�gӭ���R~�Ϻ�������ӿƼ�����˾
 ȫ�����՟ᾀ��
ȫ�����՟ᾀ��
13371980026
13371980026



Ʒ�ƣ��쿨
�ϼܕr�g��2021-11-9 �l���ߣ��Ϻ�����
�aƷ���������m�ϵ�ؓ�d�� ͨ�^���b�ڙC�����ϵ�ؓ�d���\�ӣ����繤�ߣ�����������Ť�ؾ͕��������B�ӷ��m�ϡ�����������Ť��ȡ�Q���Ƅ�܉�E��ؓ�d���|�������ĺ͑T�Ծء� ���o���Ĕ�ֵ����̎���~���g����~��ؓ�d����������ȫϵ�����ձ،�ؓ�d����ݔ�뵽�C���˿���ϵ�y�С��C���˿���ϵ�y��܉�EҎ���r��ؓ�d���]�ڃȡ� ؓ�d���Ͳ��������Ʈa����С����������Ť�ء� ��ֵ��ͨ�^ԇ��ģ�M�ó��ą���ֵ�����ڙC����ϵ����ؓ�d������ߵęC�������H����������Ť�ؿ��ܕ����B�ӷ��m�ܵ��ă��ⲿӰ푻������c��ͬ����ͬ����˽��h�ڱ�Ҫ�r�ڙC����ʹ�ìF���Č��H�l���y����������Ť�ء� �\��ֵ���Գ��m���������Ƅ�܉�E�µó������h���OӋ���ߕrע��ƣ�ڏ��ȡ� �ڙC���˳��F�o����r�r�����F�o��ֹͣ��ֵ�������@�N��r�ڙC����ʹ�É�����ֻ���O�ٵس��F������ڴ������r���o�B�����C�����ɡ�
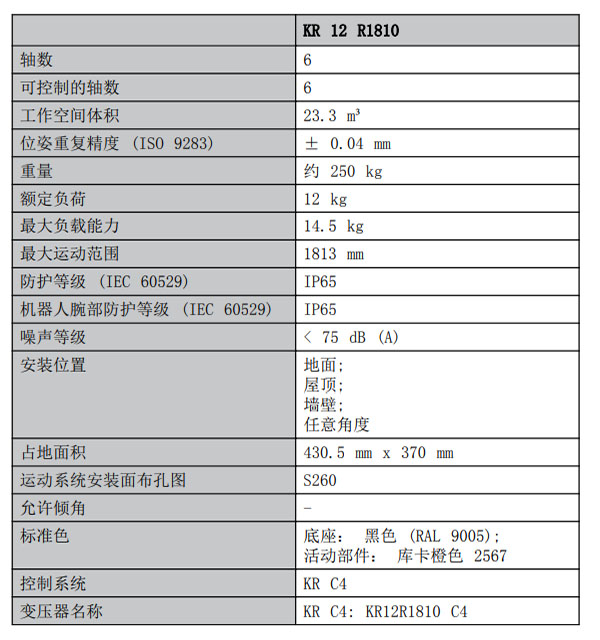
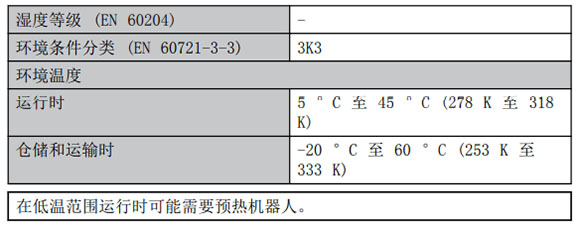
KUKA�C���� KR 12 R1810���g����Ԕ�����£�
����������
�h���l����
�B����|��
�S������
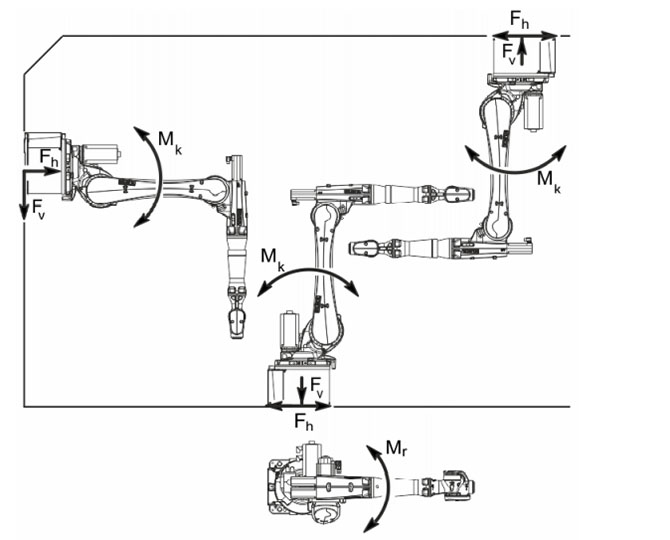
�����S���\�ӷ����λ��Ҋ�D��
�C�����S�����D����
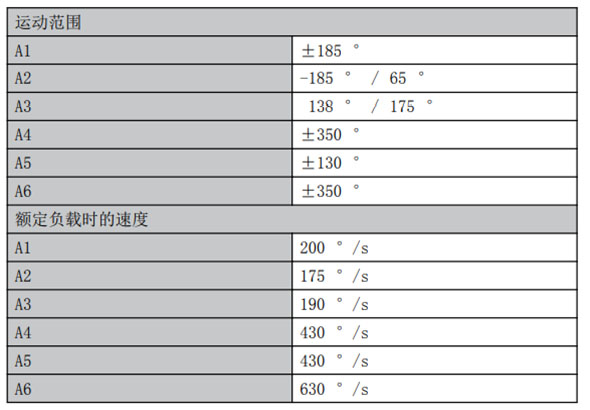
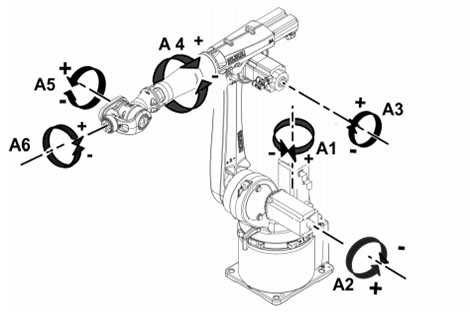
���c�˶�λ�ã�
����������
����IJ�D�鱾�aƷϵ�е��@Щ��̖�@ʾ�˹����^��Ĵ�С���Π ���������ą����c���S 4 �� 5 �Ľ��c��
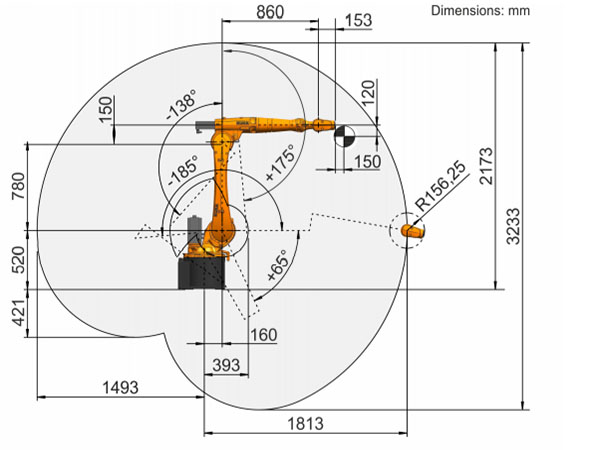
�����^��ҕ�D��KR 12 R1810
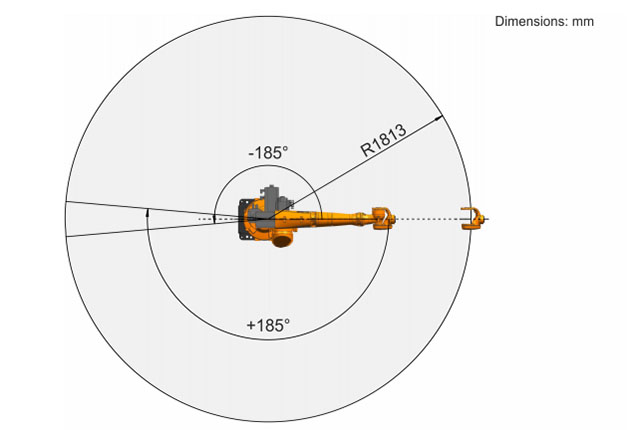
�����^��ҕ�D��KR 12 R1810
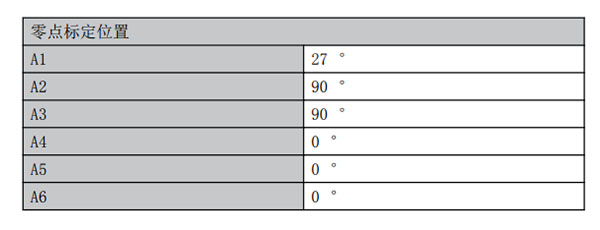
�Aбλ�ã�
�C���˿��x����� 0�� λ�ã����棩�� 180�� λ�ã��컨�壩֮�g���κ� ���bλ�á��D�@ʾ���S 1 ���\�ӷ����ڲ�ͬ�ęC���˃Aбλ���п����ܵ� �����ơ�
������ڵ���λ���\�ЙC���ˣ��t회��C���˵ăAбλ�ýǶ����_ӛ��ڿ��� ϵ�y�С����� WorkVisual �Ќ��F�Ƕ����á� �ڲ���׃�C���������I����r�ăAб�Ƕȣ�
���棺A��0�㡢B��0�㡢C��0��
���ڣ�A��0�㡢B��90�㡢C��0��
�컨�壺A��0�㡢B��0�㡢C��180��
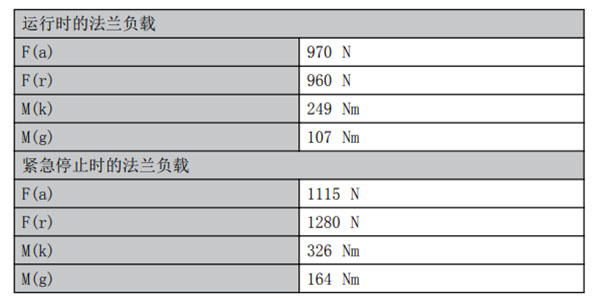
ؓ�d������
ؓ�d���ģ�
����ؓ�d��ؓ�d�����c���S 6 ���m��ľ��x���P��
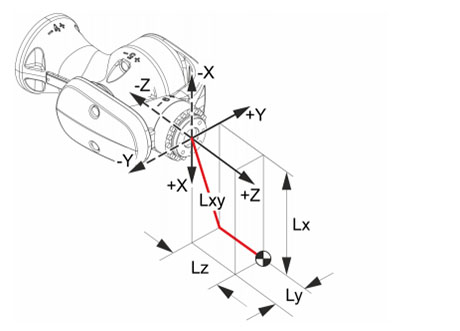
ؓ�d�����D����
��ʾ��
ԓؓ�d���������ژO��ؓ�d������ÿ�ζ���횙z��ɂ�ֵ��ؓ�d�������|�� �T�Ծأ��������r��Ӱ푙C���˵�ʹ�É�����ʹ늙C���X݆���^�d����˱� �ԃ�� KUKA Deutschland GmbH��
��̎�ó��Ĕ�ֵ���C���˵�ʹ��Ӌ���dz���Ҫ������ KUKA ϵ�yܛ���IJ� ��������ָ�ϣ��C����Ͷ���\�Еr��Ҫ�~���ݔ�딵���� ����� KUKA.Load �z��T�ԡ��ձ،�ؓ�d����ݔ�뵽�C���˿���ϵ�y�У�
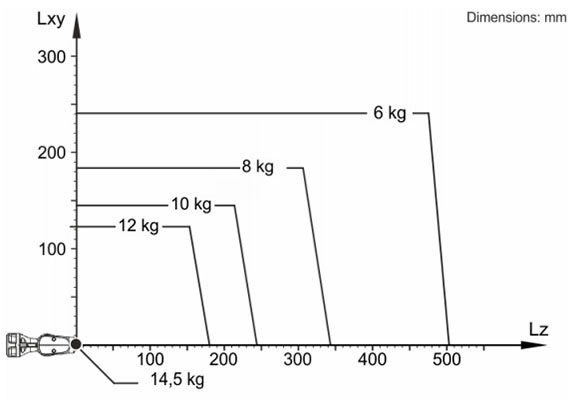
KR 12 R1810 ؓ�d�����D����
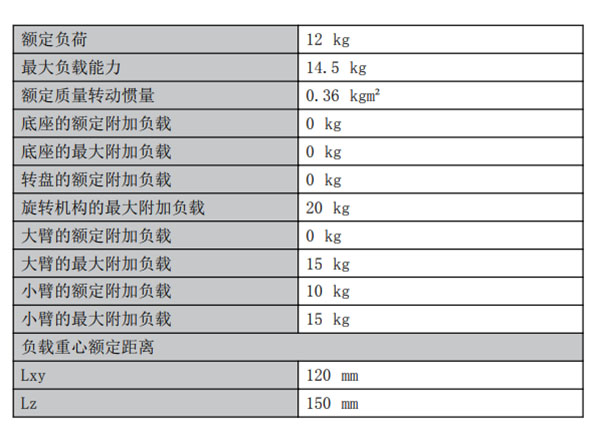
KR 12 R1810 �OӋ�����~��ؓ�d���� 12 kg���Ա�������ÙC���˵����ܺ� �ӑB���ܡ�ͨ�^�pСؓ�d�g�࣬Ҳ����ʹ�ø��_���ؓ�d�����ĸ���ؓ�d���� ���ؓ�d��r����� KUKA.Load �M�Йz�顣
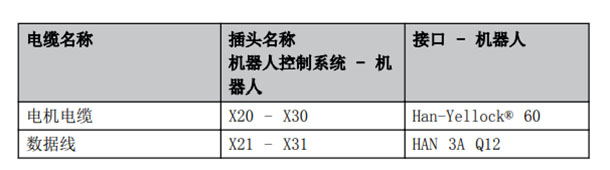
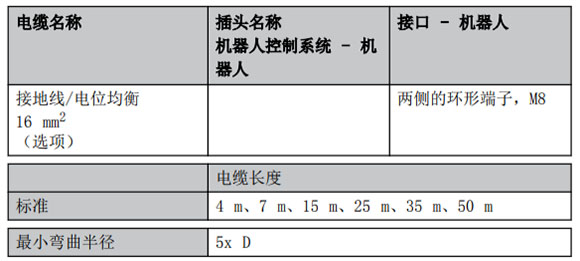
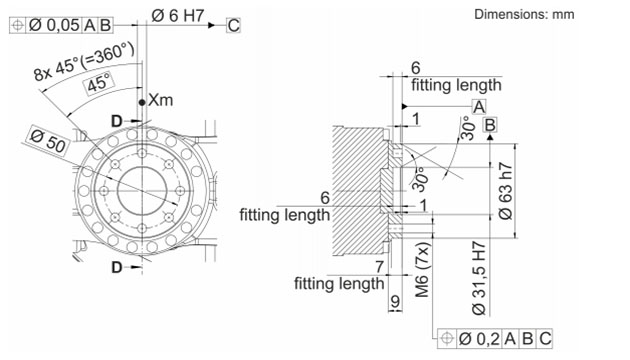
�B�ӷ��m ��

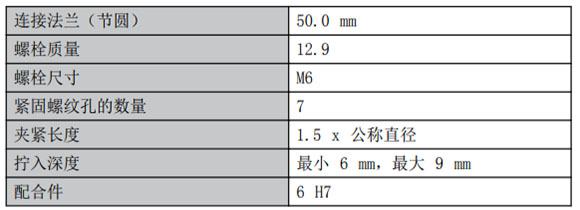
�B�ӷ��m�Dʾ�������S 4 �� 6 ����λ�r���B�ӷ��mλ �á���̖ Xm ��ʾ��ϼ����@�ף�����λ�r��λ�á�
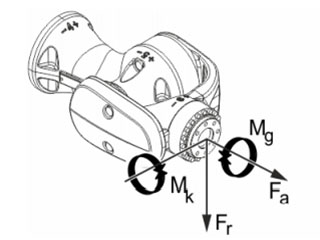
���m�ϵ�ؓ�d��
ͨ�^���b�ڙC�����ϵ�ؓ�d���\�ӣ����繤�ߣ�����������Ť�ؾ͕��������B�ӷ��m�ϡ�����������Ť��ȡ�Q���Ƅ�܉�E��ؓ�d���|�������ĺ͑T�Ծء� ���o���Ĕ�ֵ����̎���~���g����~��ؓ�d����������ȫϵ�����ձ،�ؓ�d����ݔ�뵽�C���˿���ϵ�y�С��C���˿���ϵ�y��܉�EҎ���r��ؓ�d���]�ڃȡ� ؓ�d���Ͳ��������Ʈa����С����������Ť�ء� ��ֵ��ͨ�^ԇ��ģ�M�ó��ą���ֵ�����ڙC����ϵ����ؓ�d������ߵęC�������H����������Ť�ؿ��ܕ����B�ӷ��m�ܵ��ă��ⲿӰ푻������c��ͬ����ͬ����˽��h�ڱ�Ҫ�r�ڙC����ʹ�ìF���Č��H�l���y����������Ť�ء� �\��ֵ���Գ��m���������Ƅ�܉�E�µó������h���OӋ���ߕrע��ƣ�ڏ��ȡ� �ڙC���˳��F�o����r�r�����F�o��ֹͣ��ֵ�������@�N��r�ڙC����ʹ�É�����ֻ���O�ٵس��F������ڴ������r���o�B�����C�����ɡ�
����ؓ�d��
�ڙC���˵�С�ۡ���ۺ��D�P�Ͽ��Գ��ܸ���ؓ�d��ʩ�Ӹ���ؓ�d�r��ע�����S�����ؓ�d�����b�����ijߴ��λ��Ҋ�D��
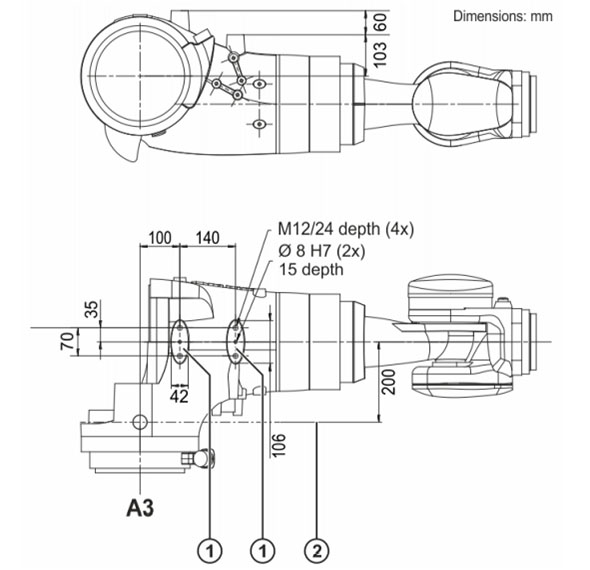
����ؓ�d�Ĺ̶���С��
1 �S 4 �����Dƽ�� ��
2 С�۵�֧���档
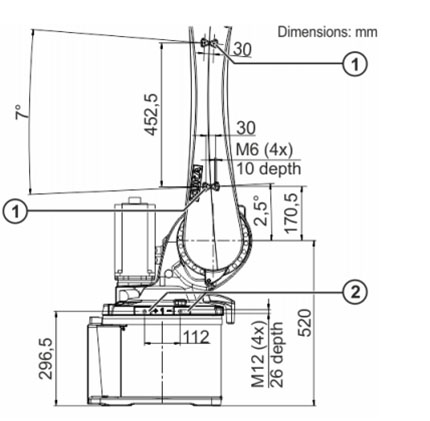
����ؓ�d�Ĺ̶������/�D�P
1 ��۵�֧���� ��
2 �D�P��֧���棬�ɂȡ�
�ػ�ؓ�d:
�o�������������ѽ������C���˵�ؓ�d�͑T��������������
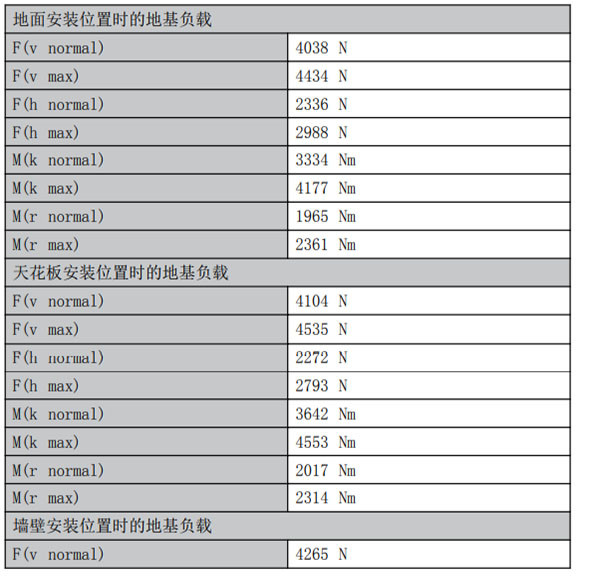
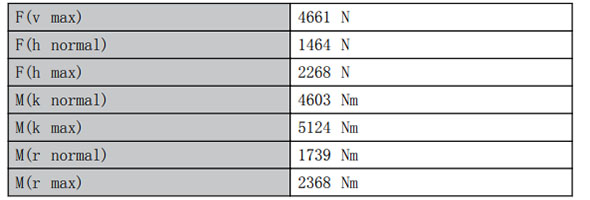
��ֱ�� F(v)��ˮƽ�� F(h)���Aб���� M(k)���S 1 ���D�� M(r)