�gӭ���R~�Ϻ�������ӿƼ�����˾
 ȫ�����՟ᾀ��
ȫ�����՟ᾀ��
13371980026
13371980026



Ʒ�ƣ�ABB
�ϼܕr�g��2021-11-5 �l���ߣ��Ϻ�����
�aƷ��������ײ�z�y���h�� һ����v�����˱�����ײ�z�y���҂����hʹ�������Ҏ�t�� • ʹ�ñM����С����ײ������ִ��Ͳ�������ֻ����ײ�����ռ����P������ • ������w�r�����ôֲ�Ԕ��ȼ��� • ���ƽӽ��Gʧ��ʹ�á� • ����Y�����˝M�⣬���Ԇ���������ײ�z�y��
ABB�C����RobotStudio�z�y��ײԔ�����£�
������
ͨ�^ RobotStudio�����əz�y��ӛ䛹���վ�Ȍ���֮�g����ײ�������B����ײ�z�y�Ļ������
��ײ����
��ײ�������ɽM����ObjectA �� Object B�����Ɍ�������������ԙz�y�ɽM֮�g�� ��ײ���� ObjectA ���κΌ����c ObjectB ���κΌ���l����ײ������ײ���@ʾ�ڈD�� ҕ�D�ﲢӛ���ݔ�����ڃȡ������ڹ���վ���O�ö�����ײ������ÿһ��ײ���H�ܰ� ���ɽM����
ͨ���ڹ���վ�Ȟ�ÿ���C���˄���һ����ײ��������ÿ����ײ�����C���˼��乤��λ ��һ�M���������c֮�l����ײ�����Ќ���λ����һ�M������C���˓��ж��������� ס���������Ԍ������ӵ��C���˵ĽM�У�Ҳ���Ԟ��@Щ�O�Ä����ض���ײ���� ÿһ����ײ���ɆΪ����ú�ͣ�á�
������ײ֮�⣬���ObejctA �cObjectB �еČ���֮�g�ľ��x��ָ�������У��t��ײ�z�yҲ���^��ӽ��Gʧ��
��ײ�z�y���h��
һ����v�����˱�����ײ�z�y���҂����hʹ�������Ҏ�t��
• ʹ�ñM����С����ײ������ִ��Ͳ�������ֻ����ײ�����ռ����P������
• ������w�r�����ôֲ�Ԕ��ȼ���
• ���ƽӽ��Gʧ��ʹ�á�
• ����Y�����˝M�⣬���Ԇ���������ײ�z�y��
��ײ���Y����
���F�ф�����һ����ײ����RobotStudio���z���� �Ќ����λ�ã����z�y ObjectA �ȵČ����c ObjectB �ȵČ�����ײ�ĕr�g�� �z�y�Ć��Ӻ���ײ���@ʾȡ�Q����ײ�z�y���O�÷�ʽ�� �����ײ��̎�ڻ�Ӡ�B��RobotStudio ���z��M�Ȍ����λ�ã���������ǰ�ɫ�O ��ָʾ����֮�g�l�����κ���ײ��
��ײ�z�y��
��ײ�z�y�ܙz��C���˻������\�����w�Ƿ���c����վ�ȵ������O��a����ײ���ڏ��s�Ĺ���վ�ȣ�������ʹ�ö�M��ײ������ͬ�M�����w�M����ײ�z�y�� ��ײ�z�y�ڄ���������������O���Ԅәz�y��ײ���������քӆ��әz�y�^�̡�
�O�Ùz�y��ײ�ĕr�g��
��Ҫ�O��ʼ�K��H�ڷ������g�O�Ùz�y��ײ��Ո�������в��E��
1 ���ļ��ˆ��У��Γ��x헡�
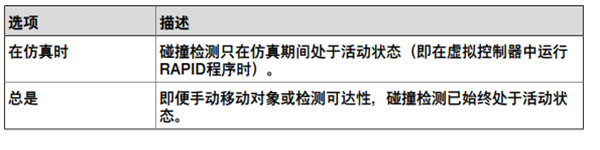
2 �ڌ����������ȣ��x�� Simulation: Collision��ģ�M����ײ����
3 �ڡ���ײ������҂ȵ��M����ײ�z�y���x�������x�֮һ��
����ײ�O�أ�
Ҫ����ײ�O�أ�Ո�����²��E������
1 �]���Γ�Ҫ�ĵ���ײ�O�أ�Ȼ������I�ˆ��x������ײ�O�ء��˕r�����_����ײ�O�،�Ԓ��
2 �ڌ�Ԓ��ĸ����ֶ����x���ݔ��Ҫ���ֵ��
3 �Γ����á� ����ײ�O���ṩ�������x헣�
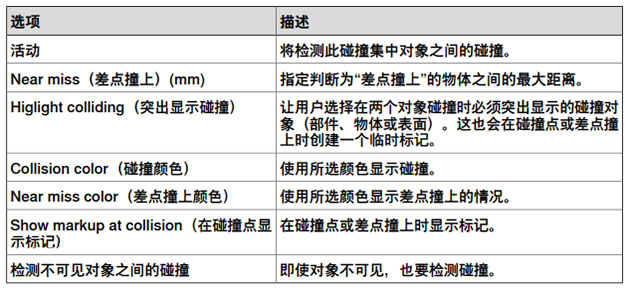
�O����ײ�z�y����
Ҫ�O����ײ�z�y����Ո�������²��E��
1 �_����ײ�z�y��������ײ���е�λ�����_�o�`��
2 �_���錦����ײ����ԓ��ײ������ͨ�^ ���� �g�[���еĈD�˱�ʾ��
Ҫ���û�ͣ����ײ����Ո�^�m���в��E��
3 �ғ�Ҫ�ĵ���ײ��Ȼ��Γ� ����ײ�O�� �Դ��_��Ԓ��
4 �x���ȡ���x�� Active�����ã����x��Ȼ��Γ� Apply�����ã���
�O�ýӽ��Gʧ�z�y��
��ײ���еČ���ӽ���ײ�r���͕��l���ӽ��Gʧ��ÿ����ײ�����и��ԵĽӽ��Gʧ�O�á�
Ҫ�O�ýӽ��Gʧ�z�y��Ո�������²��E��
1 �ڲ��֞g�[���У��ғ�Ҫ�ĵ���ײ��Ȼ��Γ�����ײ�O���Դ��_��Ԓ��
2 ��Nearmiss���ӽ��Gʧ�����У�ָ��Ҫҕ��ӽ��Gʧ�Č���֮�g�������x�� Ȼ��Γ� Apply�����ã���
�O��ӛ��x헣�
�����ԈD�η�ʽ�@ʾ��ײ֮�⣬Ҳ�Ɍ���ײӛ���ݔ�����ڻ����־�ļ���
1 �� File���ļ����ˆ��У��Γ� Options���x헣���Ȼ��Γ� Simulation��ģ �M���µ� ����ײ����
2 �ڌ����������ȣ��x�� Simulation: Collision��ģ�M����ײ����
3 �ڡ���ײ�������҂ȣ��x��ӛ���ײ��ݔ�����ڏ��x�� ��ײ��־���@ʾ��ݔ�������С�
4 �ڡ���ײ�������҂ȣ��x��ӛ���ײ���ļ����x��Ȼ���ڿ���ݔ����־�ļ��� ���Q��·���� ���x��������һ��ӛ���ײ�ĆΪ��ļ���