�gӭ���R~�Ϻ�������ӿƼ�����˾
 ȫ�����՟ᾀ��
ȫ�����՟ᾀ��
13371980026
13371980026



FANUC�C���� R-710iC���c�˶�Ԕ�����£�
��Ҫ��
�C���˵Į�ǰλ�ã�ͨ�^���S���}�_���a�����}�_��ֵ���_����
���S��؛�r���ѽ����C�����M�����c�˶����������ճ������в�����Ҫ�M�����c�˶������ǣ�������r���t��Ҫ�M�����c�˶���
�� ���Q늙C
�� ���Q�}�_���a��
�� ���Q�p�ٙC
�� ���Q늾�
�� �C�������}�_Ӌ�������늳��ñM
ע�⣺
�������c�˶������ڃȵęC���˵Ĕ������}�_���a���Ĕ�����ͨ�^���Եĺ����늳��M�б��档늳��ñM�r�����������Gʧ�������ڸ��Q�����b�ú͙C������늳ء�늳�늉��½��r��ϵ�y���l����֪ͨ�Ñ���
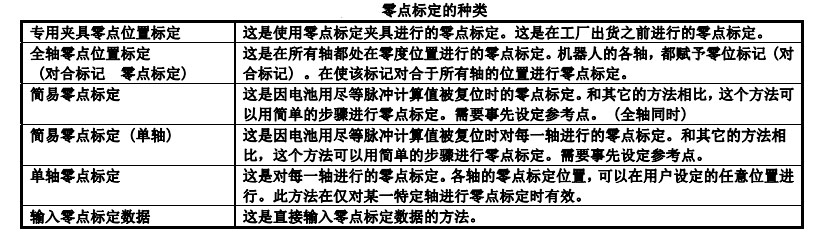
���c�˶��ķN�
���c�˶��ķ������¡����ǣ�ܛ���汾7DC2ϵ�У�V8.20P����֮ǰ�İ汾��֧�ֺ������c�˶������S����
1. ���M�����c�˶�֮����M��λ���{����У�ʣ���λ���{�����ǿ����b���x�뮔ǰ�}�_Ӌ��ֵ���R�e��ǰλ�õIJ�����
2. �@���ȫ�S���cλ�Ø˶����������c�˶������S���c�˶��Լ����c�˶�������ݔ���M���f������Ҫ����Ԕ�������c�˶������ÊA�����cλ�Ø˶�����
ϵ�ˣ�����
�֙C��17721351309
�Ԓ��021-50157782
�]�䣺shygdzi@163.com
��ַ�� �Ϻ��мζ��^���@·858̖2̖531-532